3Dイメージングシステム
DepthScan は、構造化したパターンを物体に投影し、物体の 3 次元形状を反映した反射光のパターン変化を読み取ることにより、物体の形状を定量的にイメージングする装置です。
具体的には、物体上に構造化パターンを投影し、プロジェクターとカメラを用いて物体上に投影されたパターンのイメージを取得し、その 3D ポイントクラウドを生成するイメージングシステムです。
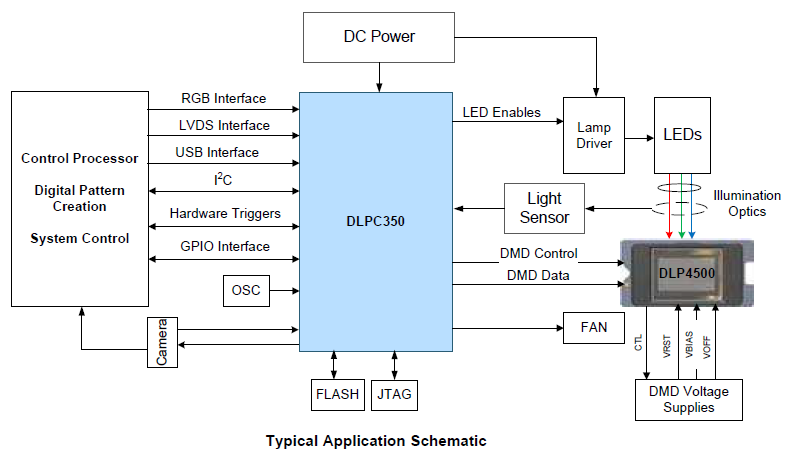
DepthScan は、DMD コントローラー、構造化照明プロジェクター、CMOS カメラから構成されています。
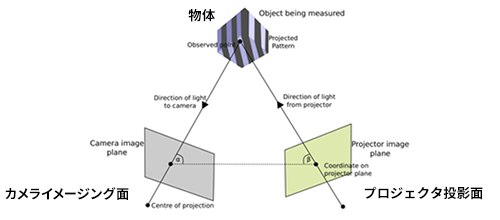
この時、DepthScanでは、光源であるプロジェクターとカメラ、物体の関係は、エピポーラ(Epipolar)ジオメトリ(立体視)の関係にあります。
この関係にあると、投影されたパターンと物体からの反射光により得られたイメージの対応関係を見出すことにより物体の深さ情報を正確に知ることができます。
つまり、プロジェクター上の特定ピクセルからの光が物体上に投影され、カメラのある位置のピクセルに入射するので、この関係を見出せば、物体の 3D 情報を取得できます。